Bezierkurven sind jedem, der Vektorgrafiken erstellt, bekannt. Eine Bezierkurve in ihrer gebräuchlichsten Form verbindet zwei Punkte, einen Anfangs- und einen Endpunkt, mir einer in gewissen Grenzen frei formbaren Linie. Mit zwei weiteren Punkten, den sog. Kontrollpunkten, ist die Form der Linie steuerbar. Im Gebrauch werden die Kontrollpunkte mit dem Start- oder Endpunkt durch Geraden verbunden. Dabei zeigt sich, dass die Richtung dieser Kontrollgeraden mit der Tangente der Bezierkurve in Start- oder Endpunkt übereinstimmt. Die Länge der Gerade bestimmt hingegen den Kurvenverlauf zwischen den Endpunkten. Was verbirgt sich aber aus mathematischer Sicht hinter einer Bezierkurve?
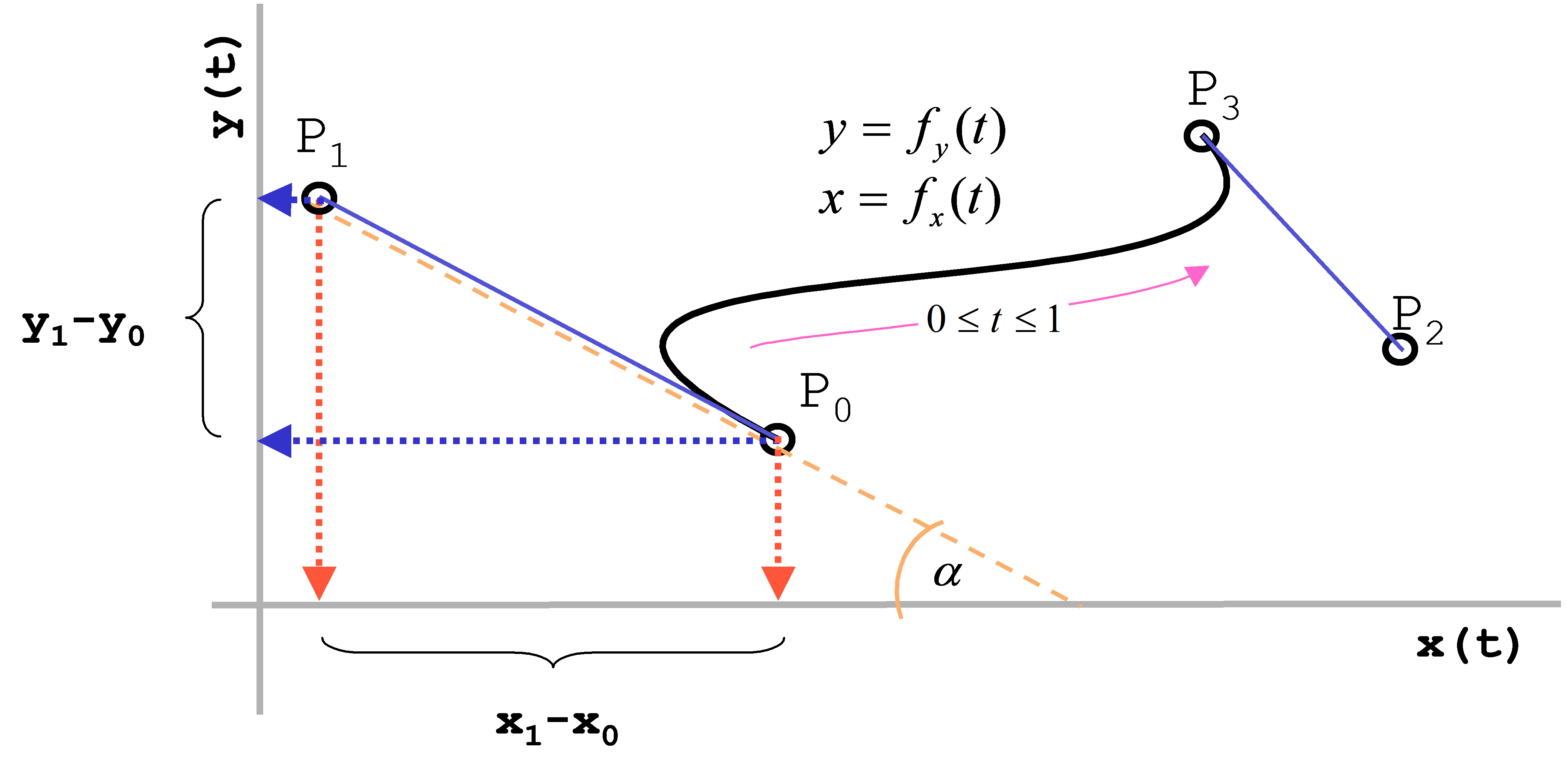
In Abbildung 14 ist der Punkt P0 der Start-, P3 der Endpunkt. Die Punkte P1 und P2 sind die Steuerpunkte. Die Kurve selbst wird durch zwei parametrisierte kubische Funktionen für x und y dargestellt:
\( x(t) = {x_0} \cdot {u_0} \cdot {\left( {1 - t} \right)^3} + {x_1} \cdot {u_1} \cdot t \cdot {\left( {1 - t} \right)^2} + {x_2} \cdot {u_2} \cdot {t^2} \cdot \left( {1 - t} \right) + {x_3} \cdot {u_3} \cdot {t^3} \) Gl. 86
\( y(t) = {y_0} \cdot {v_0} \cdot {\left( {1 - t} \right)^3} + {y_1} \cdot {v_1} \cdot t \cdot {\left( {1 - t} \right)^2} + {y_2} \cdot {v_2} \cdot {t^2} \cdot \left( {1 - t} \right) + {y_3} \cdot {v_3} \cdot {t^3} \) Gl. 87
worin die xi und yi (i = 0, 1, 2, 3) die Koordinaten der vier beschreibenden Punkte darstellen. Die ui und vi hingegen sind Gewichte, die geeignet zu wählen sind. Der sichtbare Funktionsverlauf entsteht durch die übliche Darstellung der Funktionswerte von y und x in einem kartesischen Koordinatensystem.
\( y(x) = y(x(t)) \) Gl. 88
Die Bedeutung des Parameters 0 ≤ t ≤ 1 wird deutlich, wenn die Funktion an ihren Rändern (t=0 bzw. t=1) betrachtet wird. Dann ist zu erkennen, dass der Einfluss des jeweils anderen Punktpaares ausgeschlossen ist und die Funktionswerte mit den Koordinaten der jeweiligen Punkte übereinstimmen, wenn die Gewichte u0 und u3 bzw. v0 und v3 gleich 1 gewählt werden:
\( x(0) = {x_0} \text{ und } x(1) = {x_3} \) Gl. 89
\( y(0) = {y_0} \text{ und } y(1) = {y_3} \) Gl. 90
Mit dieser Randwert-Betrachtung konnten die Werte für die Gewichteu0, u3, v0,v3 bestimmt werden. Wie aber sind die Gewichteu1, u2, v1, v2 zu bestimmen? Hier kommt nun die Forderung ins Spiel, dass die Richtung der Steuergeraden mit der Tangente der Kurve im jeweiligen Endpunkt übereinstimmen soll:
\( \frac{ {dy(x(t = 0))} }{ {dx} } = \frac{ { {y_1} - {y_0} } }{ { {x_1} - {x_0} } } \) Gl. 91
bzw.
\( \frac{ {dy(x(t = 1))} }{ {dx} } = \frac{ { {y_2} - {y_3} } }{ { {x_2} - {x_3} } } \) Gl. 92
Nun kann die Gl. 87 nicht direkt nach dx abgeleitet werden, da sie ja keine Funktion von x darstellt.
Daher werden sowohl Gl. 87 als auch Gl. 88 nach dt abgeleitet und entsprechend
\( \frac{ {dy} }{ {dx} } = \frac{ {dy} }{ {dt} } \cdot \frac{ {dt} }{ {dx} } \) Gl. 93
zum gesuchten Differenzialquotienten kombiniert.
Mit
\( \frac{ {dx(t)} }{ {dt} } = - {x_0} \cdot 3{\left( {1 - t} \right)^2} + {x_1} \cdot {u_1} \cdot \left[ { { {\left( {1 - t} \right)}^2} - 2t\left( {1 - t} \right)} \right] + {x_2} \cdot {u_2} \cdot \left[ {2t \cdot \left( {1 - t} \right) - {t^2} } \right] + {x_3} \cdot 3{t^2} \) Gl. 94
\( \frac{ {dy(t)} }{ {dt} } = - {y_0} \cdot 3{\left( {1 - t} \right)^2} + {y_1} \cdot {v_1} \cdot \left[ { { {\left( {1 - t} \right)}^2} - 2t\left( {1 - t} \right)} \right] + {y_2} \cdot {v_2} \cdot \left[ {2t \cdot \left( {1 - t} \right) - {t^2} } \right] + {y_3} \cdot 3{t^2} \) Gl. 95
wird Gl. 115 zu
\( \frac{ {dy} }{ {dx} } = \frac{ { - {y_0} \cdot 3{ {\left( {1 - t} \right)}^2} + {y_1} \cdot {v_1} \cdot \left[ { { {\left( {1 - t} \right)}^2} - 2t\left( {1 - t} \right)} \right] + {y_2} \cdot {v_2} \cdot \left[ {2t \cdot \left( {1 - t} \right) - {t^2} } \right] + {y_3} \cdot 3{t^2} } }{ { - {x_0} \cdot 3{ {\left( {1 - t} \right)}^2} + {x_1} \cdot {u_1} \cdot \left[ { { {\left( {1 - t} \right)}^2} - 2t\left( {1 - t} \right)} \right] + {x_2} \cdot {u_2} \cdot \left[ {2t \cdot \left( {1 - t} \right) - {t^2} } \right] + {x_3} \cdot 3{t^2} } } \) Gl. 96
Nunmehr erfolgt der Vergleich mit den Bedingungen von Gl. 91 und Gl. 92:
\( {\left. {\frac{ {dy} }{ {dx} } } \right|_{t = 0} } = \frac{ { - {y_0} \cdot 3 + {y_1} \cdot {v_1} } }{ { - {x_0} \cdot 3 + {x_1} \cdot {u_1} } } = \frac{ { {y_1} - {y_0} } }{ { {x_1} - {x_0} } } \) Gl. 97
bzw.
\( {\left. {\frac{ {dy} }{ {dx} } } \right|_{t = 1} } = \frac{ { - {y_2} \cdot {v_2} + {y_3} \cdot 3} }{ { - {x_2} \cdot {u_2} + {x_3} \cdot 3} } = \frac{ { {y_2} - {y_3} } }{ { {x_2} - {x_3} } } \) Gl. 98
Die geforderte Gleichheit ist nur zu erfüllen, wenn u1,u2, v1, v2 = 3 sind. Damit sind nun alle Elemente der Bezierkurve gefunden und die Gleichungen lauten nunmehr:
\( x(t) = {x_0} \cdot {\left( {1 - t} \right)^3} + {x_1} \cdot 3t \cdot {\left( {1 - t} \right)^2} + {x_2} \cdot 3{t^2} \cdot \left( {1 - t} \right) + {x_3} \cdot {t^3} \) Gl. 99
\( y(t) = {y_0} \cdot {\left( {1 - t} \right)^3} + {y_1} \cdot 3t \cdot {\left( {1 - t} \right)^2} + {y_2} \cdot 3{t^2} \cdot \left( {1 - t} \right) + {y_3} \cdot {t^3} \) Gl. 100